





informasi produk
E5-CAT-HS68D adalah driver servo hybrid ECCAT baru dari ECON Technology, menggunakan teknologi pemrosesan digital MCU 64-bit floating-point terbaru, algoritma kontrol drive menggunakan teknologi variabel mutakhir dan teknologi konversi frekuensi lanjutan, driver rendah panas, motor kecil getaran, berjalan lancar. Pengguna dapat menetapkan alamat ID apa pun dalam 1-255 dan nilai saat ini dalam nilai arus, pencocokan motor, dan sebagainya, untuk memenuhi sebagian besar aplikasi. Drive servo hybrid EtherCat dapat menggerakkan motor servo hybrid dari Nema23 ke Nema34 .
Fitur Produk
● Teknologi floating point 64bit MCU baru
● Jenis drive motor: motor servo hybrid, dari Nema23 ke Nema34
● Mendukung Beckoff / Delta / Omron PLC
Indeks Teknis Dasar Produk
Model | Seri | Mengetik | Jenis kontrol | Protokol yang didukung | Model operasi | Tahap | Tegangan Suplai | Output Saat Ini (A) | Digial of Inputs | Digial dari Output | Input analog | Motor yang cocok |
E5-CAT HS68D | E5-CAT | Servo hybrid (setpper loop tertutup) | Ethercat | CoE, CiA402 | PP.PV, HM, CSP | 2 | 2-50VDC | 8 | 5 | 3 | / | Nema17,23,24,34 hybrid servo (loop tertutup motor) |
Konektor Dan Penugasan Pin
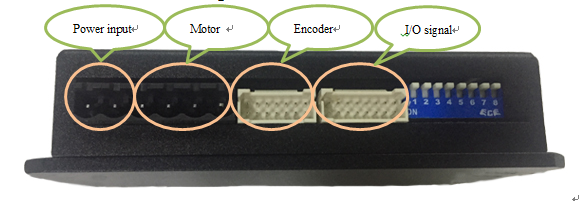
E5-CAT-HS68D memiliki empat konektor, konektor untuk koneksi i / o, konektor untuk Umpan Balik Encoder dan sinyal hall, konektor untuk koneksi daya dan motor, dan Port Komunikasi CAT.
Deskripsi Antarmuka Produk Dan Pengkabelan
1) Mengontrol konektor sinyal
Fungsi Pin | Detail |
pl + | Sinyal pulsa: Dalam mode arah Pulse +, input ini mewakili sinyal pulsa, aktif di setiap sisi naik atau turun, Dalam mode CW / CCW, input ini mewakili pulsa searah jarum jam (CW), aktif baik di setiap level tinggi dan level rendah. 4-28V untuk PUL-HIGH, 0-0.5V untuk PUL-LOW. Untuk respons yang andal, lebar pulsa harus lebih dari 1,5μs |
tolong | |
dr + | Sinyal Dir: Dalam mode arah Pulsa +, sinyal ini memiliki level tegangan rendah / tinggi yang mewakili dua arah putaran motor; dalam mode CW / CCW (dapat dikonfigurasi perangkat lunak), sinyal ini adalah pulsa counter-clock (CCW), aktif baik pada level tinggi dan level rendah (dapat dikonfigurasi perangkat lunak). Untuk respons gerak yang andal, sinyal DIR harus di depan sinyal PUL paling tidak 2,5μs. 4-28V saat DIR-HIGH, 0-0.5V saat DIR-RENDAH. Harap dicatat bahwa arah rotasi juga terkait dengan pertandingan kabel motor-Drive. Saling menukar koneksi dua kabel untuk koil ke Drive akan membalikkan arah gerakan. Untuk respons yang andal, lebar pulsa harus lebih dari 1,5μs |
dr- | |
di + | Sinyal kecepatan rendah: in1, in2, in3 input postive umum, 5-28VDC |
in1 | Input negatif in1 kecepatan rendah |
in2 | Input negatif in2 kecepatan rendah |
in3 | Input negatif in3 kecepatan rendah |
ot- | Output emitor OC negatif umum, ot1, ot2, ot3 emitor terminal keluaran umum |
ot1 | ot1 keluaran emitor, tegangan pull-up 24Vdc, resistensi pull-up 2KΩ, arus output Max 100mA |
ot2 | ot2 emitter output, tegangan pull-up Max 24Vdc, resistance pull-up 2KΩ, output 100mA saat ini |
ot3 | ot3 emitter output, tegangan pull-up Max 24Vdc, resistance pull-up 2KΩ, output arus Max 100mA |
gnd | 5V- |
RS232-TX | Pengiriman RS232 , listrik TTL-3.3V , gunakan untuk mengatur atau menggunakan parameter |
RS232-RX | RS232 menerima , listrik TTL-3.3V , digunakan untuk mengatur atau menggunakan parameter |
5V | 5V +, 50mA saat ini |
2) Umpan Balik Encoder dan Konektor sinyal hall
Fungsi Pin | Detail |
ea + | Input encoder saluran A |
ea | |
eb + | Input saluran B encoder |
eb- | |
ez + | Input Z saluran enkoder (jika ada sinyal Z dalam enkoder, tidak perlu koneksi) |
ez- | |
eu + | Input hall U channel U, khusus untuk dc brushless servo, loop terbuka / hybrid servo tidak diperlukan koneksi |
eu- | |
ev + | Input U hall Hall V, khusus untuk dc brushless servo, loop terbuka / hybrid servo tidak diperlukan koneksi |
ev- | |
ew + | Input hall U channel Hall, khusus untuk dc brushless servo, loop terbuka / hybrid servo tidak diperlukan koneksi |
baru | |
5V | Menyediakan daya 5V + dc ke motor encoder dan komponen Hall, 100mA saat ini |
gnd | 5V- |
3) Tenaga dan Motor
Pin | Definisi | I / O | Deskripsi |
1 | A + | HAI | Fase Motor A + |
2 | A- / U | HAI | Motor Phase A- (U untuk motor dc brushless servo) |
3 | B + / V | HAI | Motor Phase B + (V untuk motor servo brushless dc) |
4 | B- / W | HAI | Motor Phase B- (W untuk motor dc brushless servo) |
5 | + VDC | saya | 15-50VDC, 36VDC direkomendasikan, menyisakan ruang untuk fluktuasi tegangan dan back-EMF. |
6 | GND | GND |
4) Port Komunikasi EtherCAT

Dua terminal RJ45
PIN | Sinyal | Deskripsi fungsi | |
1 | TX + | Data Eter CAT mengirim port positif | EtherCAT IN (ECAT IN) |
2 | TX- | Data Ether CAT mengirim port negatif | |
3 | RX + | Data Eter CAT menerima port positif | |
4 | NC | Tidak terhubung | |
5 | NC | Tidak terhubung | |
6 | RX- | Data Ether CAT menerima port negatif | |
7 | NC | Memutuskan | |
8 | NC | Memutuskan | |
9 | TX + | Pengiriman data Ether Ether positif | EtherCAT OUT (ECAT OUT) |
10 | TX- | Pengiriman data Eter CAT negatif | |
11 | RX + | Data CAT Ether menerima positif | |
12 | NC | Tidak terhubung | |
13 | NC | Tidak terhubung | |
14 | RX- | Data CAT Ether menerima negatif | |
15 | NC | Tidak terhubung | |
16 | NC | Tidak terhubung |
Catatan: Kabel yang menghubungkan E5-CAT-HS68D ke PC harus merupakan kabel khusus. Silakan periksa sebelum digunakan untuk menghindari kerusakan.
Manual Referensi
Panduan pengguna drive servo hybrid EtherCAT ET-CAT-HS86D
Rekomendasi
Nema23 motor servo hybrid dengan 2,9Nm
Nema34 motor servo mudah 8.5Nm dengan rem
Nema34 step motor servo dengan torsi 12Nm
Motor stepper loop tertutup Nema24 dengan torsi 4Nm
Tag populer: ethercat hybrid servo driver, produsen, pemasok, pabrik





